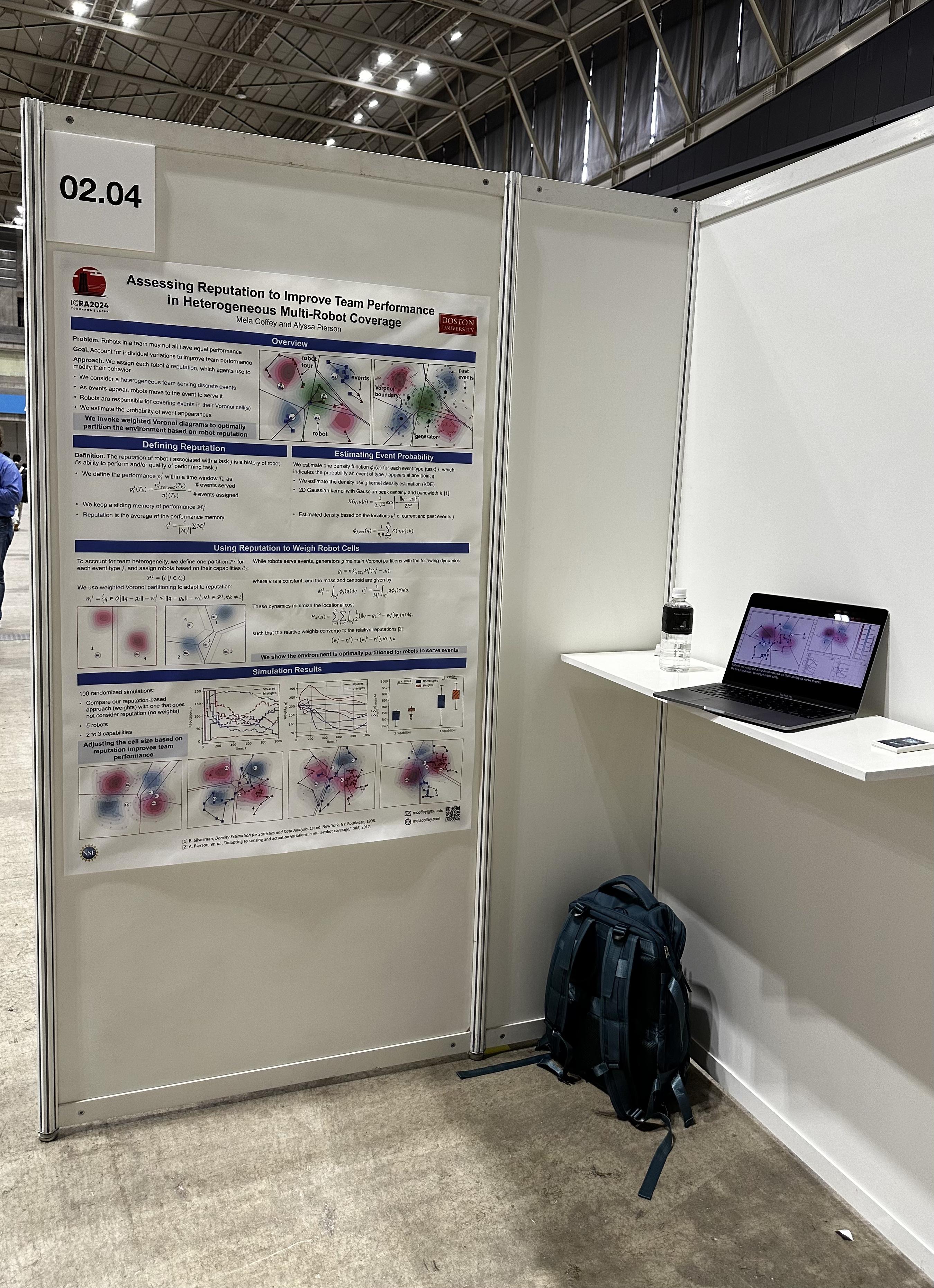
I recently returned from the 2024 IEEE International Conference on Robotics and Automation (ICRA), and what an amazing conference! I had the opportunity to present my work on using robot reputation as a tool to improve the performance of multi-robot teams. In our work, each robot assesses the reputation of itself and other robots, and then modify its behavior to improve the overall team performance. Check out our paper here, and my video presentation for more details!
The ICRA organizing committee really spoiled us this year, with food, drinks, and performances each night of the conference. It was such an amazing experience, and it was great to reconnect with those in the robotics community, especially those within the Multi-Robot Systems Technical Committee! I am also grateful to have been able to travel with my two labmates in the Collaborative Autonomy Group (a subset of the BU Robotics Lab led by Professor Alyssa Pierson). I was also a second author on another ICRA paper led by my colleague, Kamran Vakil, which focuses on efficient computation in multi-agent stochastic dynamic games.


Following the conference, I was fortunate enough to travel around Japan, visiting multiple temples in Kyoto, walking around Tokyo, and taking a day trip to the base of Mount Fuji. What an incredible trip!



