Reputation to Improve Team Performance
In this work, we address the problem in which, in a multi-robot team, each robot may have varying performance. For example, some robots may be able to serve demand more quickly than others.
Here, we consider a robot team serving discrete events in the environment, with each event requiring a different Here, we consider a robot team serving discrete events in the environment, with each event requiring a different capability. In the figure, the various capabilities are the blue square, red triangle, and green circle, and each of the events require one or more of those capabilities. In practice, these capabilities could be resources, such as food, water, and medical supplies, that need to be delivered across the environment. The robots traverse the space to serve those events.
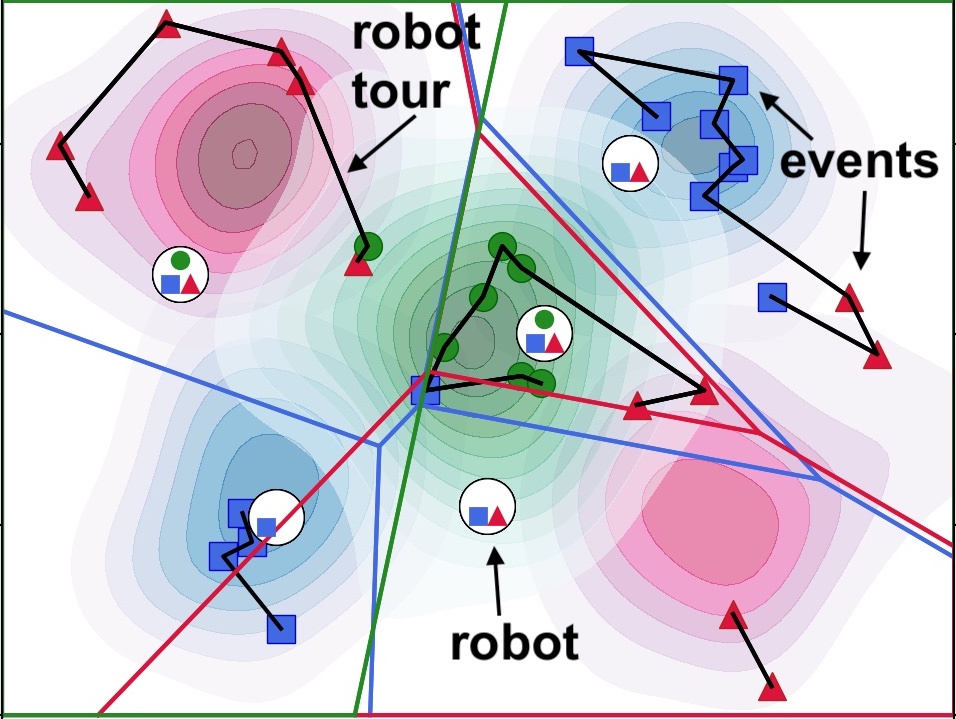
In our approach, we assign tasks using Voronoi-based coverage control, such that each robot is responsible for serving the events that appear in their cell. Then, each robot computes a tour using some routing algorithm (we use a Traveling Salesman Problem), following their tour to serve events. Robots can better position themselves to serve events by computing the probability at which events appear in the space -- these probabilities are depicted by the contours.
For more details, please read our paper here, published in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA 2024), and check out the presentation video below!