Haptic Modules
Prior to my collaborative teleoperation work in the Pierson Group, I worked under Dr. Rebecca Khurshid in the Collaborative and Integrative Robotics (CAIR) Lab, a former branch of the BU Robotics Lab. There I worked with two other graduate students to develop wearable haptic modules to provide various types of haptic feedback to the user. The figure on the right shows the five modules we developed:
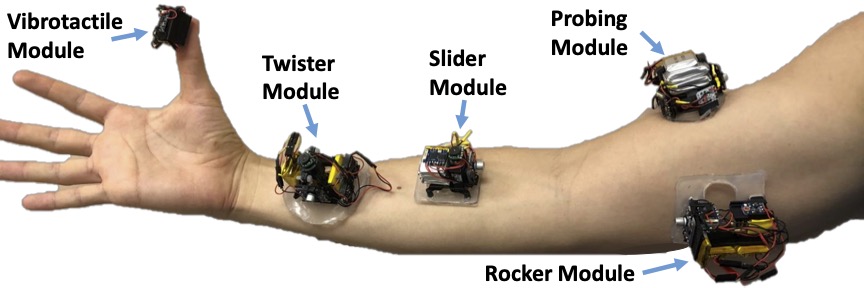
- vibrotactile module provides vibrotactile feedback
- twister module provides rotational skin stretch
- slider and rocker modules provide linear skin stretch
- probing module provides a tapping or probing sensation
Note that unlike other haptic devices found in the literature, our modules do not require a strap to mount the devices to the body. Rather, they utilize a skin-safe silicone adhesive which can be donned and doffed multiple times. My primary contributions were the development of the skin-safe adhesive, vibrotactile module, twister module, and rocker module.
Further details can be found in our paper [pdf] [url] on which I am a co-first author. We also made a github repository which contains the necessary files and list of materials to develop our modules. The video below summarizes our work and also demonstrates the utilization of the modules.