Collaborative Navigation
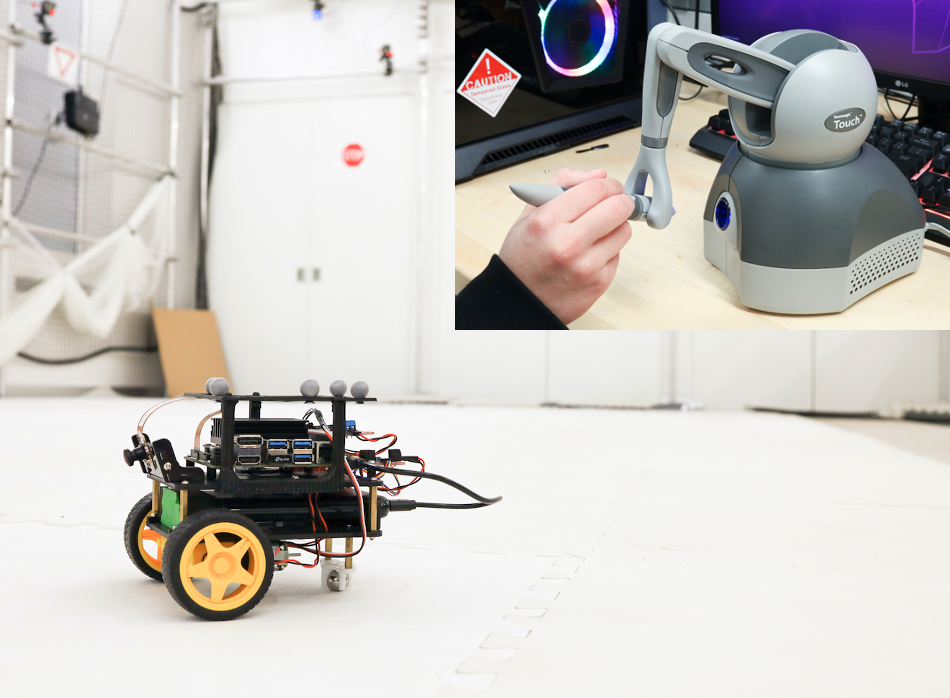
For my first project in the Collaborative Autonomy Group, I developed an algorithm for a human to work collaboratively with a robot to navigate through an environment. In this work, the human is responsible for making high level navigation decisions about where to steer the robot. The robot, in turn, predicts the user's intended goal pose, and computes safe paths from the current pose to the predicted goal pose, while accounting for any local obstacles. If the user is steering the robot to an unsafe position, the robot will provide force feedback via a haptic device, shown in the upper right corner, to help the user maintain a safe robot state.
This work was accepted for publication and presentation at the 2022 IEEE International Conference on Intelligent Robots and Systems (IROS). The supplemental video below summarizes our work, and further details can be found in our paper here. My IROS presentation can be found on my YouTube channel here.
As an extension of this work, in a recent paper accepted to IROS 2023 and in collaboration with Roberto Tron's group in the Robotics Lab, we use control barrier functions (CBFs) for collision avoidance and control lyapunov functions (CLFs) for guidance along a suggested path. Check out the pre-print of this paper here and the corresponding presentation below.